作者: Yoshifumi Kuriyama, Ken'ichi Yano and Masafumi
Hamaguchi
本文出处:
17th IEEE International Conference on Control Applications
Part of 2008 IEEE Multi-conference on Systems and Control
San Antonio , Texas , USA , September 3-5, 2008
近年来,医疗辅助机器人的开发与设计成为一个重要的课题,本篇研究的重点,在于利用 CFD
计算流体力学配合最佳化设计,研究如何取得机器手臂在移动汤匙的过程中,不会造成流体溢出的运动轨迹。
初步设定及模拟比对
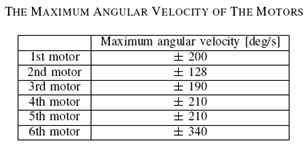
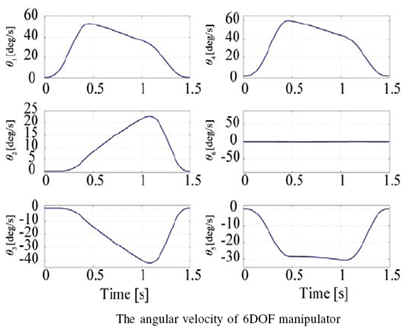
机器人本体由六个运动马达组成,每个马达的最大运动角素度如下表。
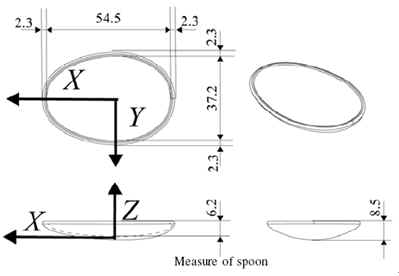
汤匙的规格如下图
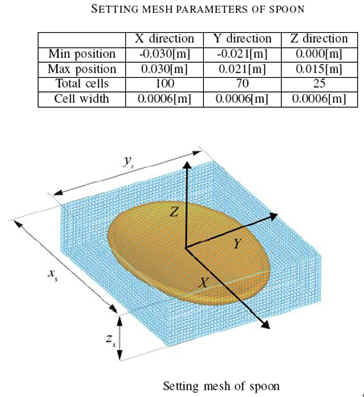
在本研究中搭配使用的 CFD 软件为 FLOW-3D ,流体的体积为 0.0047 × 10 ? 3 [m 3 ]. ,流体的物理性质如下表。
FLOW-3D 的网格尺寸及设定如下所示。
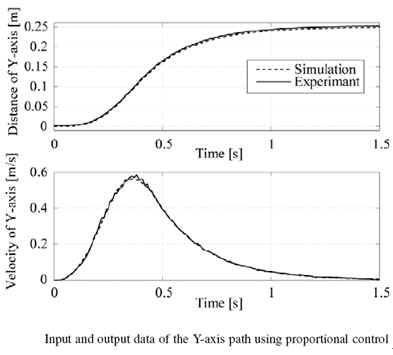
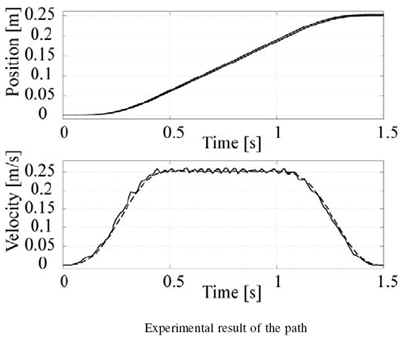
在此研究中,汤匙沿着 Y 轴移动,下图表示其位移量及移动速度。
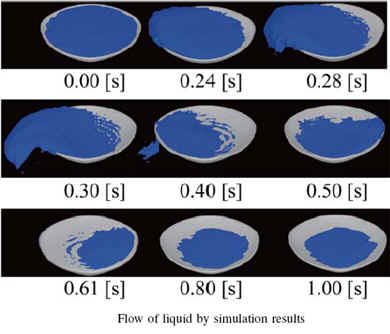
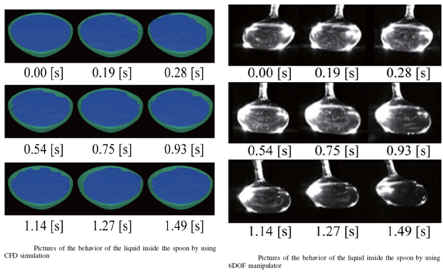
下图则是以 FLOW-3D 进行模拟之分析结果以及实际机器手臂运动时流体的溅出状况。
Part A. 最佳化的设定流程
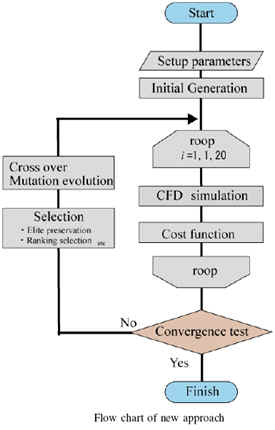
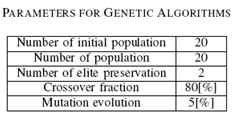
本研究的计算流程可以由下列流程图表示。因此首先必须先定义出相关的参数以及决定初始条件。
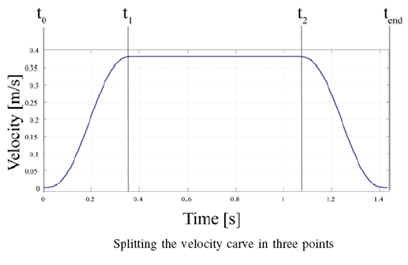
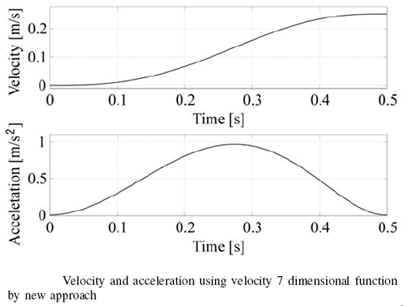
研究中,移动路径是由速度曲线积分而得,如下图。
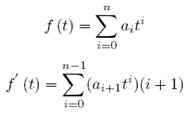
速度曲线可大致分为三个区块,分别是加速区 , 等速区 , 以及减速区。而速度曲线可以用七个常数加以描述,如下之方程式。
根据
1. t = 0
2. t=t1
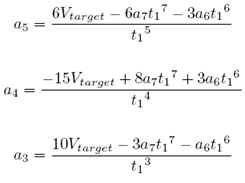
前述之七个设计常数可为
当 t=t1 时
Part B. 指定最佳化限制
1.最小移动速度不能够小于零。
2. 每个马达的转动角速度不得大于马达规格。
3. 移动过程中波溅出的水量必须小于零。
将上述评估方程式以程序计算
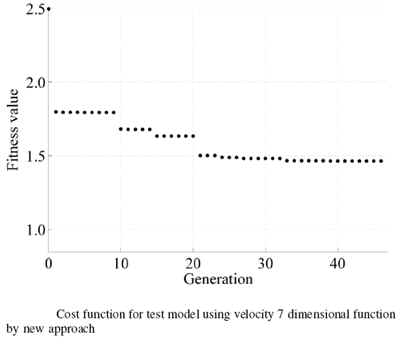
Part C. 计算结果
Part D. 分析结果与实验比对
|